1. Why
I have multiple cameras, and I always shoot with Raw+JPG, but at the end of the day, I only need the raw file since it’s better for post-processing
So everytime I do the work
- Open the folder
- Select the JPG image
- Delete the JPG image
- Right click the remained RAW file
- Import to Lightroom
This process is simple but I don’t like repeat it, so an automation tool would be great
2. How
In a nutshell, we can use Automator and Python to finish the job
- Automator is just to run the Python script and tell the Python script where is the location
- In Python, the code will run the logic 2/3/4/5
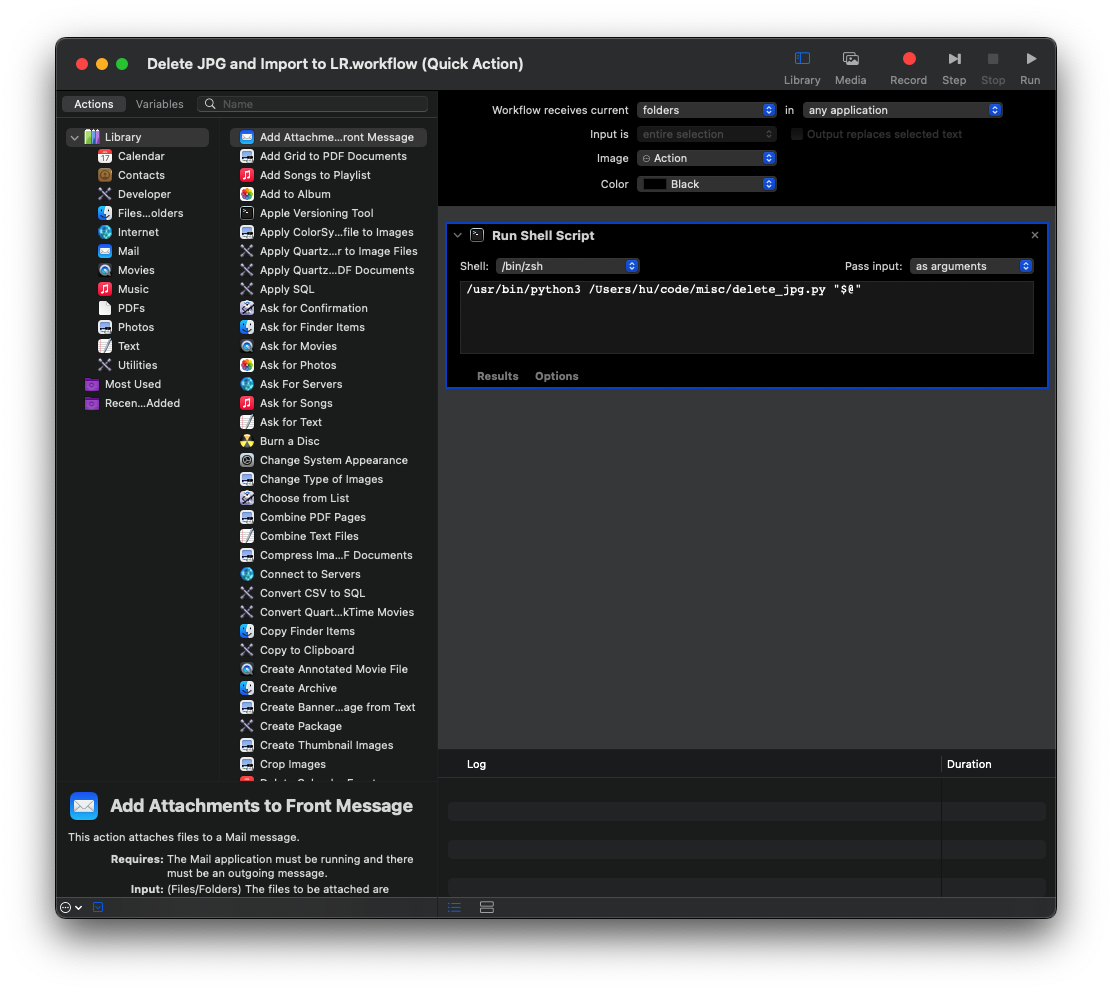
Python code: