1. QT
signal
- when signal emit, it would run instantly.
Current Problem
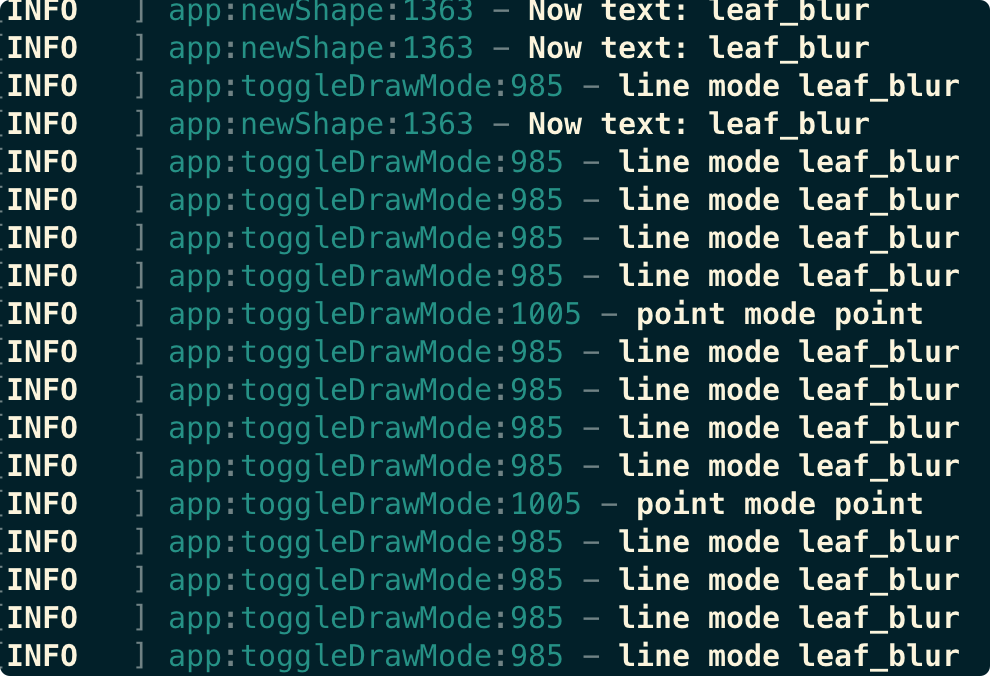
- Line mode could be activated multiple times
- Point mode only 1 times
- Rect mode can’t be activated after Line mode
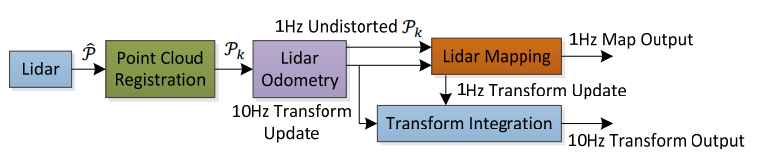
2. How it Works?
- Make the Line work as Rect
- add custom text for label