1. Intro
Using the Webots to do the simulation of general mobile arm robot
Current, the simulation have following task to do (in high level)
- Build a simulation world (Place something)
- Obstacles
- Object
- Robot base movement simulation (SLAM)
- Robot arm manipulation simulation (Kinematics and Inverse)
2. Roadmap
2.1. Build the World
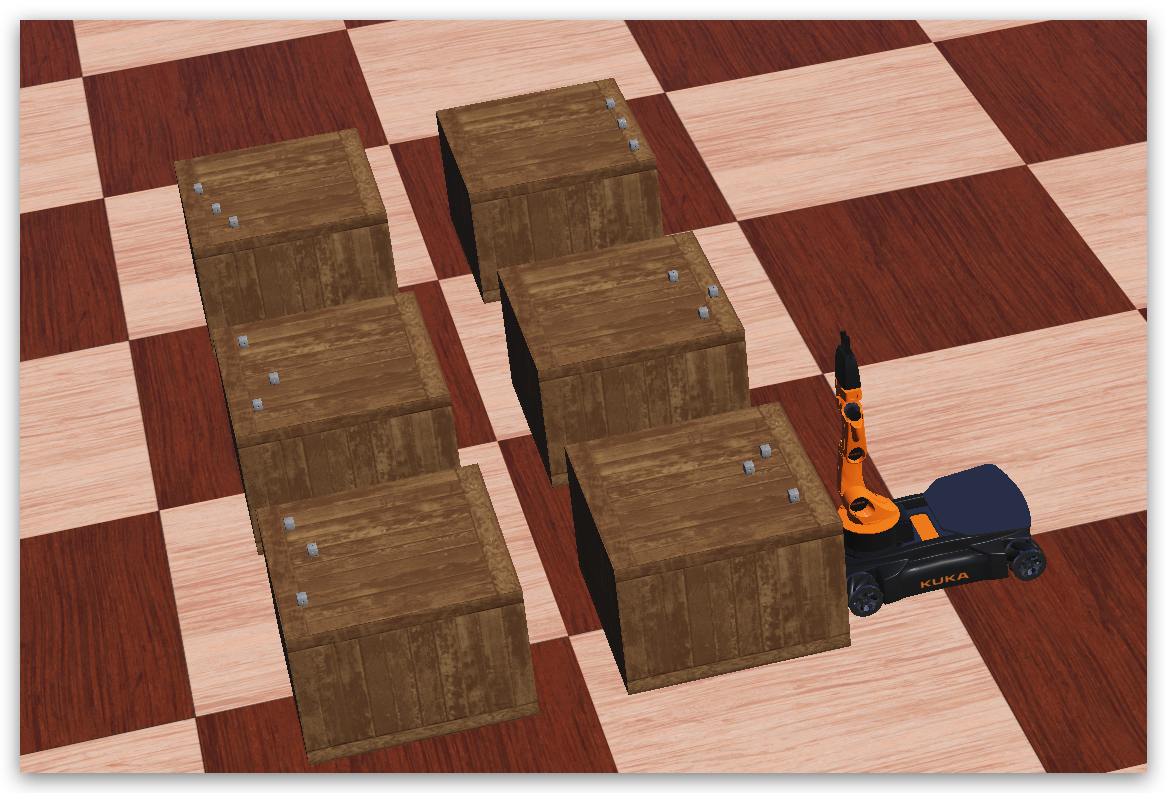
- The big box simulate the tea tree
- The small box simulate the tea leaf
- The YouBot simulate our robot
2.2. Migrate from Matlab to Python
Control robot move by control the wheel directly
step is important to update and sync the robot and world
2.2.1. Base
Movement. Turn. Go through location
2.2.2. Arm
ik
3. Setup
Using Python as the controller
Change the preferenceRecompile the wrapper
No need to recompile the Python binding since in newer version, the python is already in header file format
Just include the /Applications/Webots.app/Contents/lib/controller/python
in the Python path
And set the robot controller to extern
4. Design
Learn from the youbot design
4 Part
- Arm
- Base
- move forward/backward/left/right
- Gripper
- init
- Set gap
- grip/release