1. Intro
It has been several weeks since the project begins. To make the project more clear, we can summarize the progress here and plan the next step
2. Current
Material:
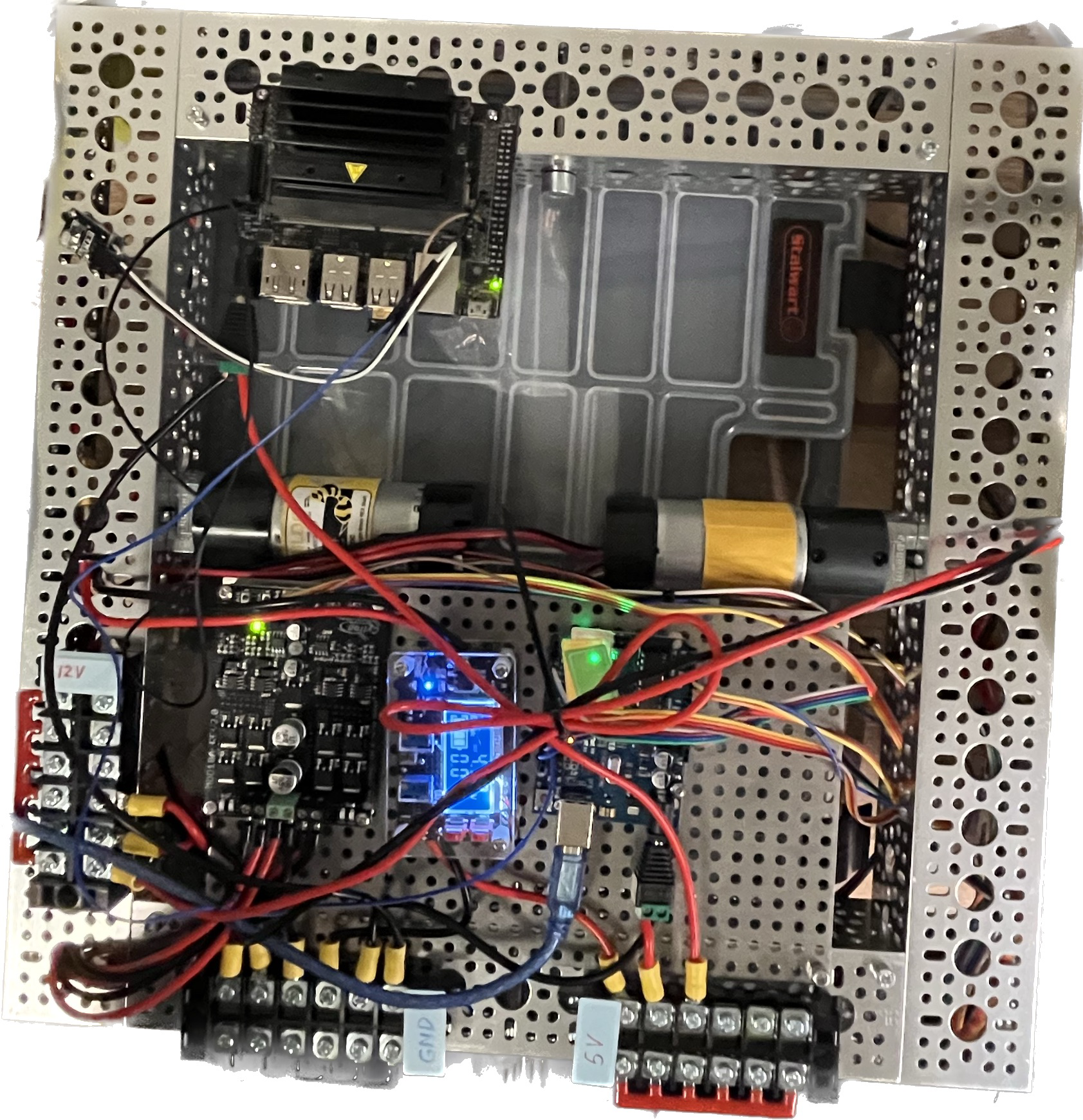
- Chasis
- Power distribution: 12V, 5V, GND, voltage transformer, power
- Move: Motor
- Control: Arduino, Jetson Nano
- Sensor
- Encoder
- IMU
- IR: for communication and control
Function
- Remote Manual Control: move forward/backward, rotate clockwise/counter-clockwise. SPEED CONTROL
- TODO: move robot to a specific position. POSITION CONTROL
- use IMU, accumulate the ACCL
- TODO: use lidar to build map and refer it for localization. CLOSED LOOP POSITION CONTROL
- use Lidar
For the current phase, the goal is to move from point A to point B
- due to the design, easy to rotate and move
3. Next Phase
For a robot, movement is the most basic task, following by the question: what can it do?
I would like to see a robot can move and finish some task that are useful, for example, clean the floor
- Force feedback
- Motor arm
厨房机器人
半年的时间做一个demo
投入20w-30w美元
- 招人
- 电气开发,福龙水平
- 算法开发
合作:
- 工业扫地
- 酒店送餐机器人
- 不大的企业
场景
- Fry robot