1. Intro
Overlooked the localization problem earlier.
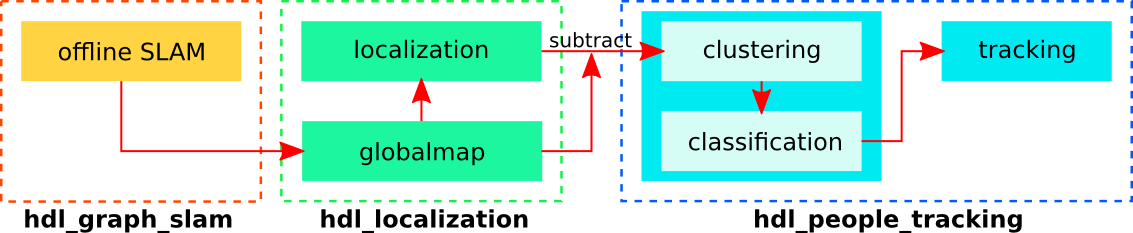
So now the system is more clear
- Offline map construction
- Use LOAM series to build graph map and construction
- Online global localization
- Use HDL (GICP) to to the localization in real time
2. System
3. Test Via Point Data
Building Map:
- y=5200, x=0
- x=1920, y=5200
- y=(745)73*80+100-65*80, x=1920
- y=-300, x=700
- x=150, y=-56
Map
- x=0,y=5200-80
- x=1920,y=5200
- x=1920, y=745-80
- x=1920-460, y=745-80-100
80: 3
73: 2+3
一共65
58块80
7块73
14-7*7=35