1. Goal
Try to recover the path using lidar data
Data: Newer College Dataset from Oxford
- Why not self-acquired data? Hard to get the ground truth, low resolution data
The data: quad with dynamics
- 4 loops of quad with increasingly aggressive motion of device with swinging and fast walking (398 seconds)
Hardware
- Intel Realsense D435i - a stereoscopic-inertial camera
- Ouster OS-1 (Gen 1) 64 - a 64 multi-beam 3D LiDAR also with an IMU
2. Explore
Read the ground truth
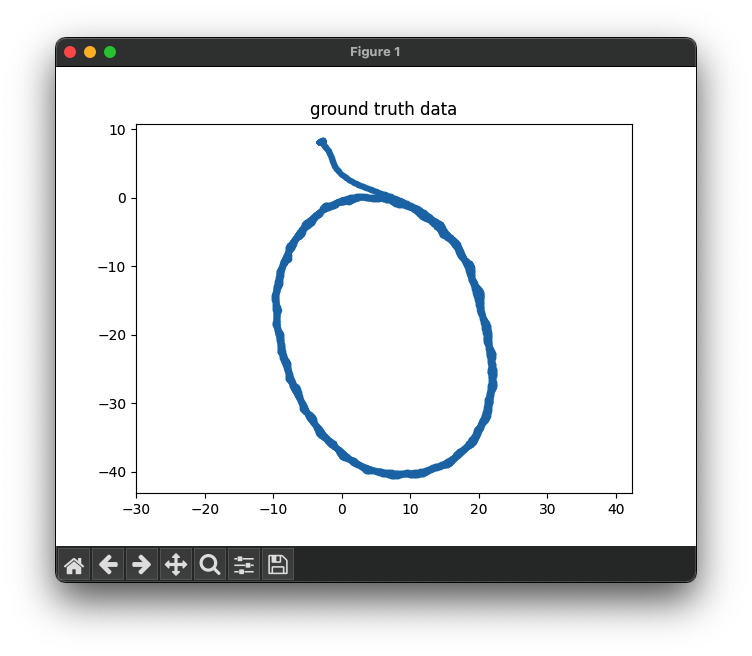
X: from -10 to 20
Y: from -40 to 10
Read data, from Ouster OS1
1 | struct_fmt = f'<{1024*64*3}H' |
64 in veritical
1024 in honrizontal
3 for [x,y,z]
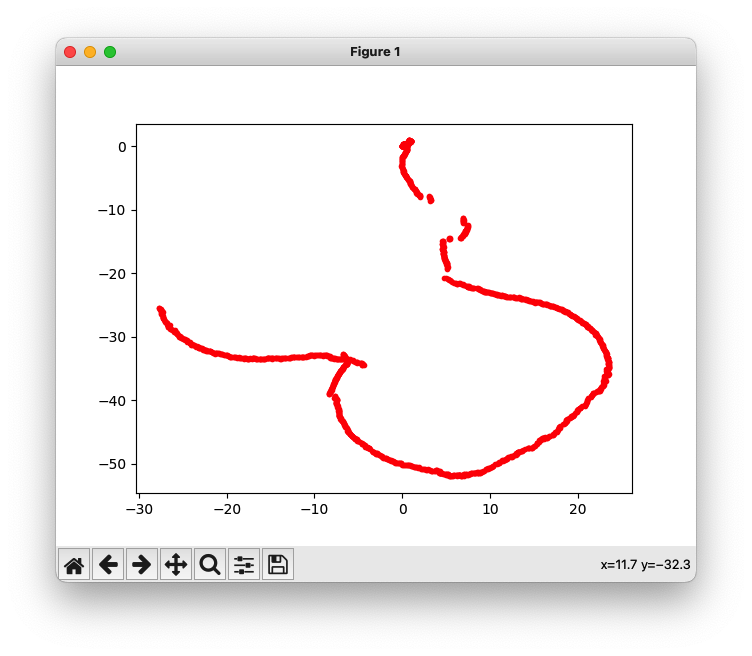
Test ICP in 2D
Read PointCloud Data in Python
- Offset defined in fields is important
- Calculate how many byte needed for the info
- ROS’s PointCloud2 data,
- Read the fields, understand how much inforamtion for a point, e.g 48byte and related datatype, e.g float32
- Init a struct to read the data