1. 1 Introduction
This project was brought to make a flight controller from scratch.
I want to learn from the process so the flight controller will be more general. However the model of the flight and selection of controller platform(STM32/Arduino/Linux ) will make the general task more difficult.
Before the program, I have no experience in flight controller programming. So I would learn from other project shared on Github.com.
2. 2 Learning from Others
2.1. 2.1 HackFlight
As a education oriented project, Hackflight is simple, platform-independent, header-only C++ firmware for multirotor flight controllers and simulators
2.1.1. 2.1.1 Unit
First of all, HackFlight defined some standard units to write simpler code.
- Distance $ m/s $
- Time $ s $
- Euler angle $ radians $
- Stick demand interval $ [-1,1 ] $
- Motor demands $ [0,1] $
- Quaternions interval $ [-1,1] $
2.1.2. 2.1.2 Programming Structure
This project is a practice of C++ for it’s speed and object-oriented features
HackFlight build several separate class to provide basic function of a controller.
- Board class, specifies 4 abstract method a flight must implement
- Sending commands to the motors
- Getting current quaternion from the IMU
- Getting gyrometer rates from the IMU
- Getting the current time
- Receiver class perform basic function associate with R/C control
- Mixer class that can be subclassed by specific mixer like QuadX / Bicopter
- PID_Controller class specific the PID value appropriate for your model
2.1.3. 2.1.3 Design Principle
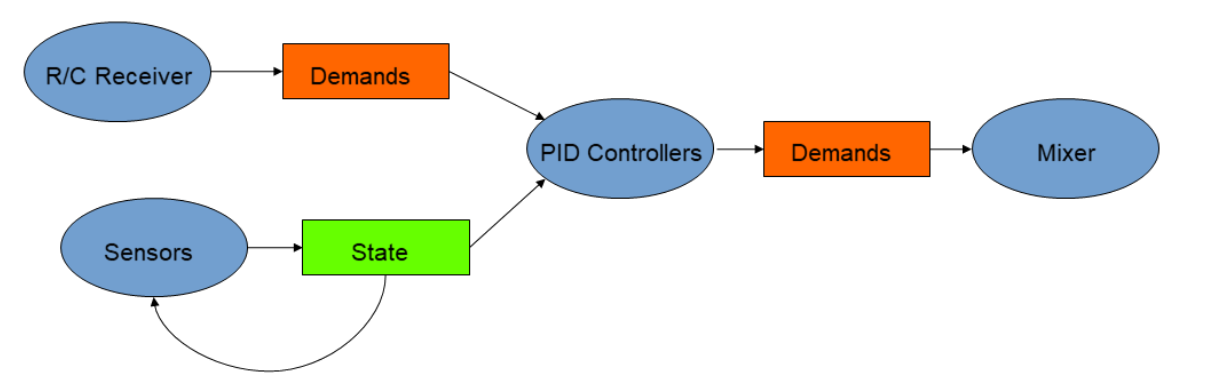
There are 2 basic data type:
- State: State is updated by sensors which read IMU sensors and calculate quaternion
- Demands
There are 2 basic fly mode: All a kind of PID controller
- Self-Level Mode: Auto mode, hold the angle or keep the level when there is no input. The input is regarded as the distance you want to move
- Rate Mode: Manual/Acro mode. The input is taken as the speed you want to move