1. How
Given a observation, we can have a distribution
How to transform from multiple observation to a estimation?
- Random pose
- Measure the similarity
- Resample
- Update
2. What if NO map
We need SLAM
Two kind
- Filtering: EKF, particle
- Only estimate based on the latest observation
- Smoothing: pose graph optimization
- Optimize the whole trajectory
Pose Graph Optimization
- Consider each move, the confidence is set by how much we trust the odometry
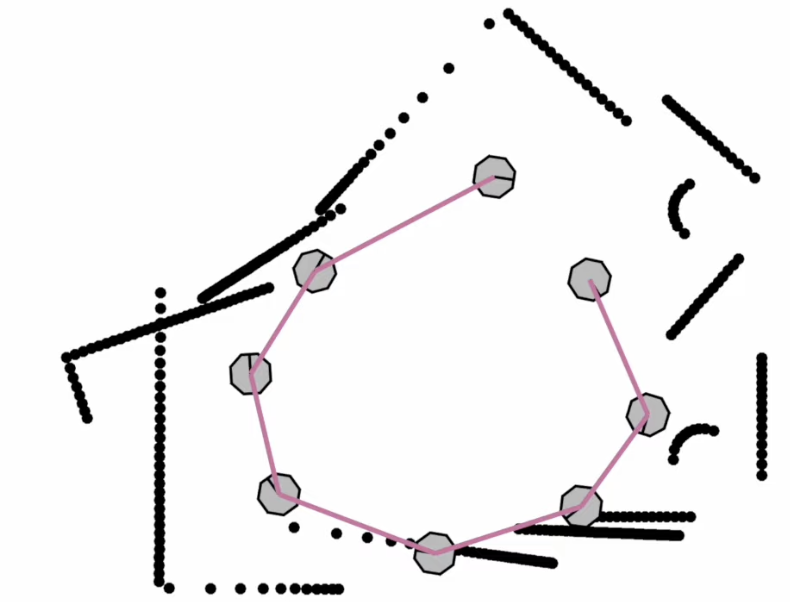
- Key: align the feature that detected in different pose