1. What
Lidar SLAM coupled with IMU and GPS (optional)
2. Components
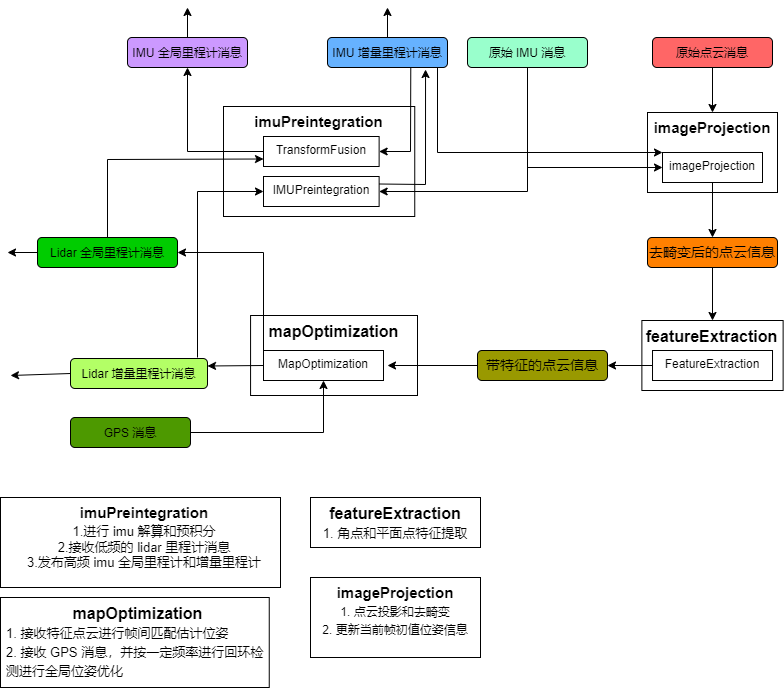
- ImuPreintergration
- ImageProjeection
- Feature Extraction
- MapOptimization
Two odometry
- Incremental, use only local matching
- Global, for loop detection and optimization
3. IMU
- Input: raw IMU, lidar odometry output
- Output: local IMU odometry, global IMU odometry
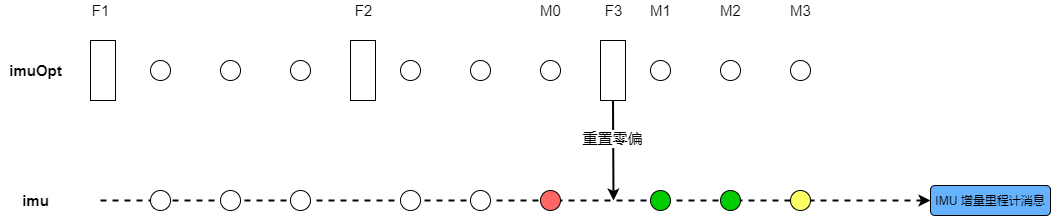
- imu: used to directly calcualte the pose
- imuOpt: used to optimization
4. ImageProjection
- Input: raw IMU, IMU odometry output, and raw point cloud
- Output: corrected point cloud with related index
5. Feature Extraction
Almost the same as LOAM
- corner point
- plane point
6. MapOptimization
Input: Point Cloud, GPS
Output: lidar odometry (global and incremental)
- Main thread
- loop detection loop