1. Intro
Problem:
- have the learned 3D lidar point cloud map
- given a single frame (lidar scan) from lidar
- calculate current robot position and pose (without knowing initial pose)
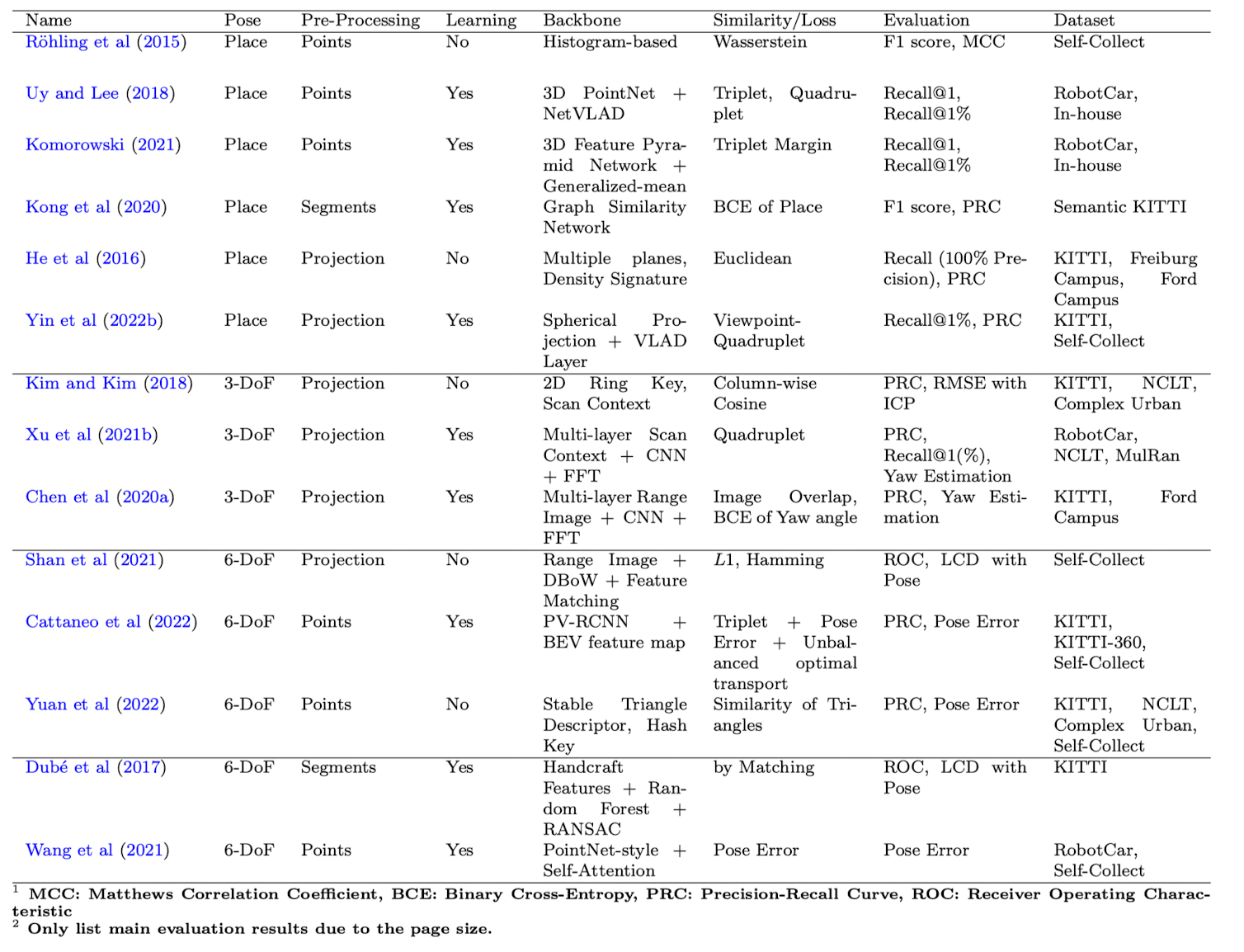
2. Review
Map
- Keyframe-based submaps
- Global feature map
- Global metric map
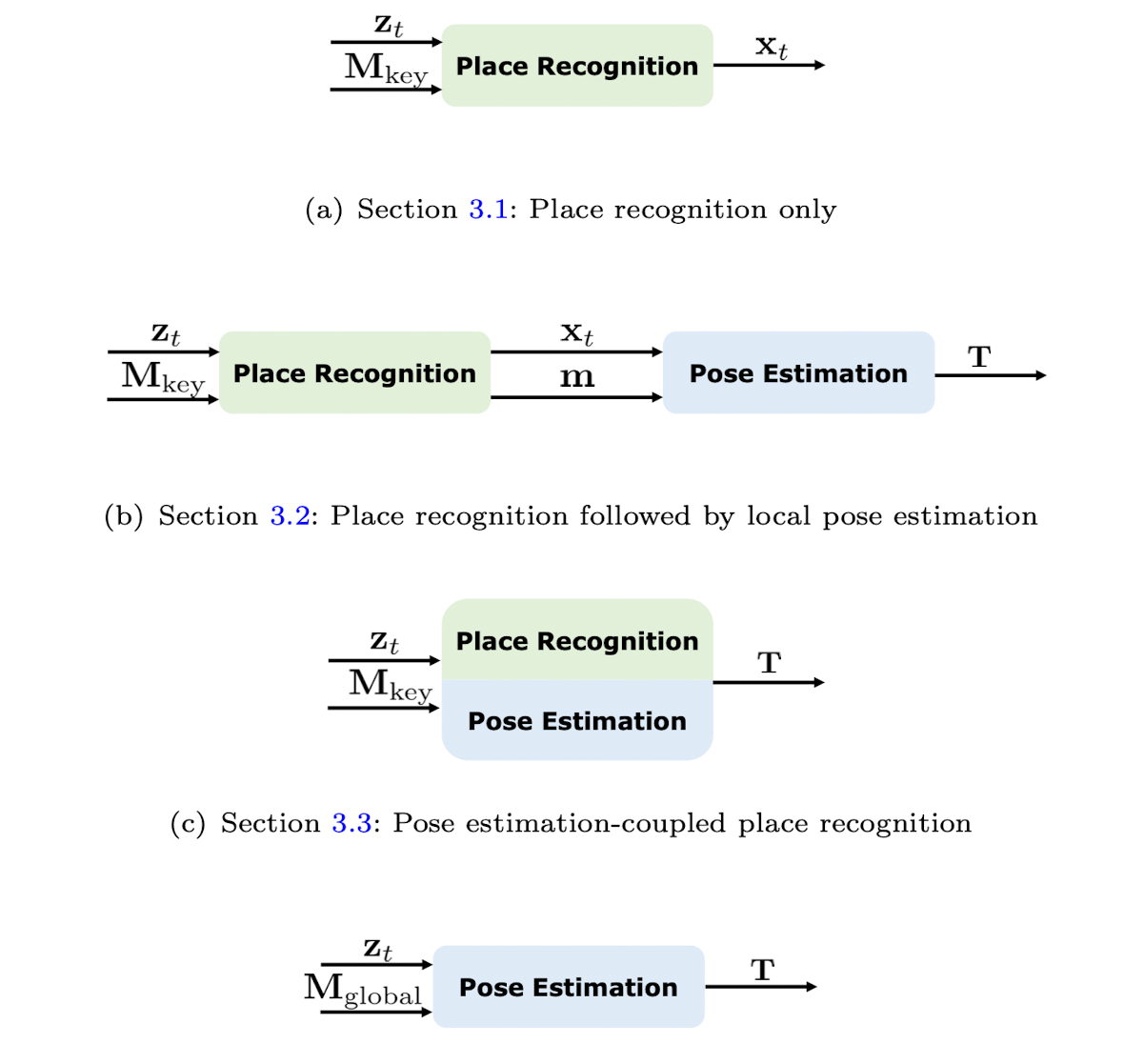
Single shot localization
- Place Recognition: match the keyu frame
- Place Recognition and Local Pose Estimation
- Pose Estimation coupled Place Recognition
- One stage global estimation