1. Intro
Goal: calibrate between leishen lidar C16 and 6 axis IMU
2. Theory
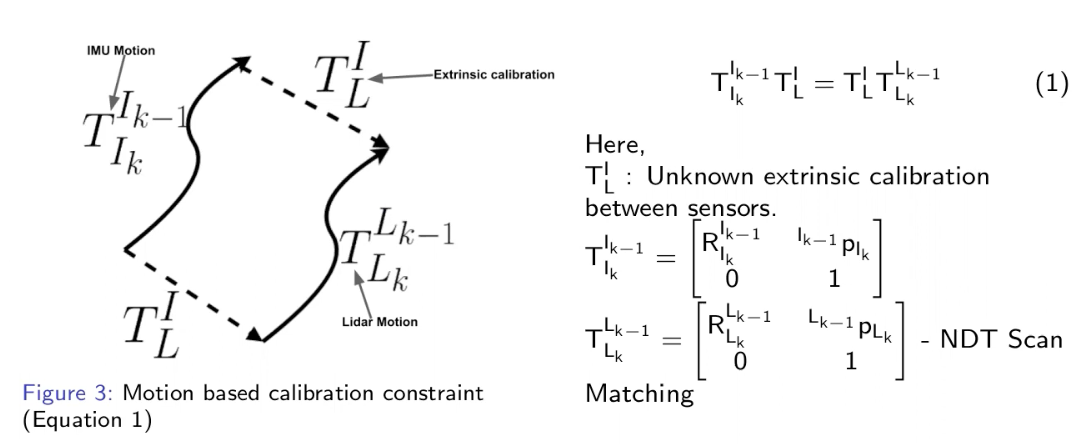
Goal: estimate the extrinsic
$$
T_L^I=\left[\begin{array}{cc}
R_L^I & { }^I \mathrm{P}_{\mathrm{L}} \
0 & 1
\end{array}\right]
$$
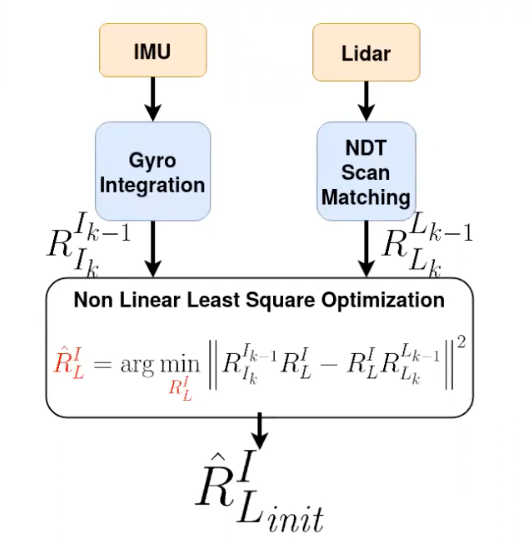
Step:
- Rotation Estimation
Motion of Lidar = Motion of IMU
- Tranlation Estimation
Refine the rotation and translation
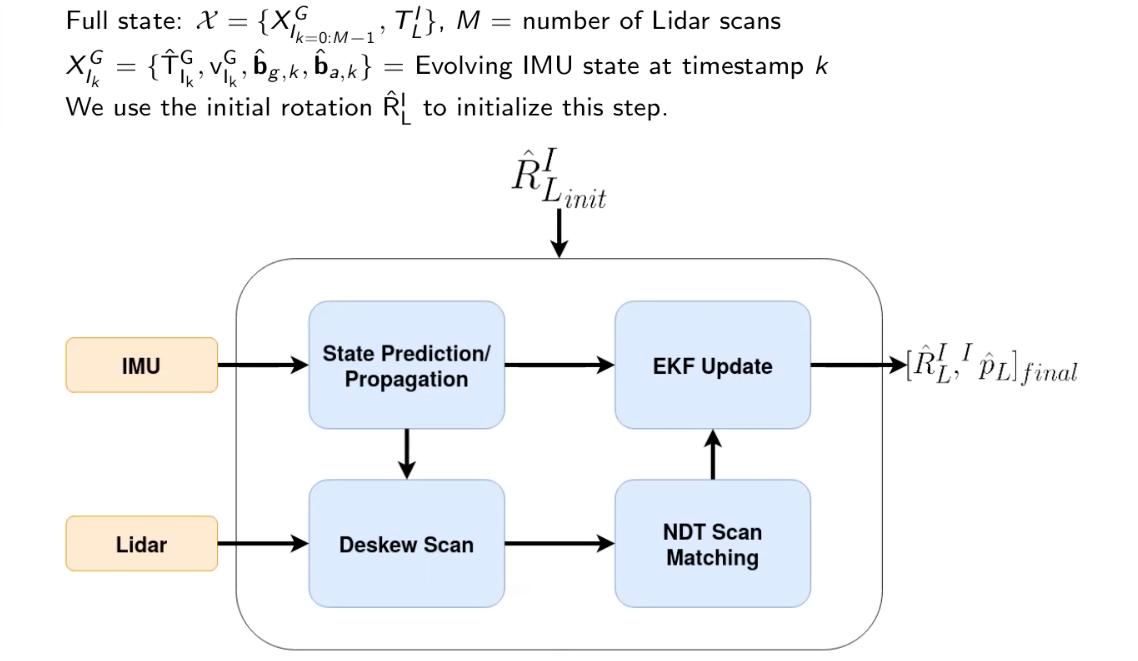
the key state is from Lidar data
Minimize the data in a EKF process
System design
3. Data Analysis
The data sample
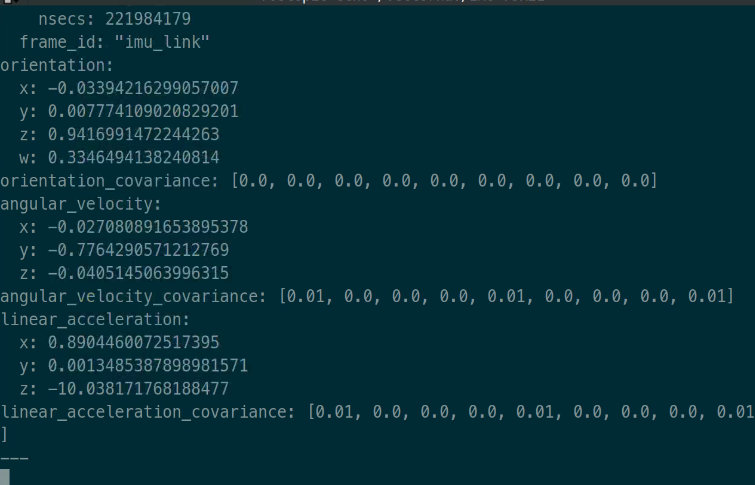
Ours
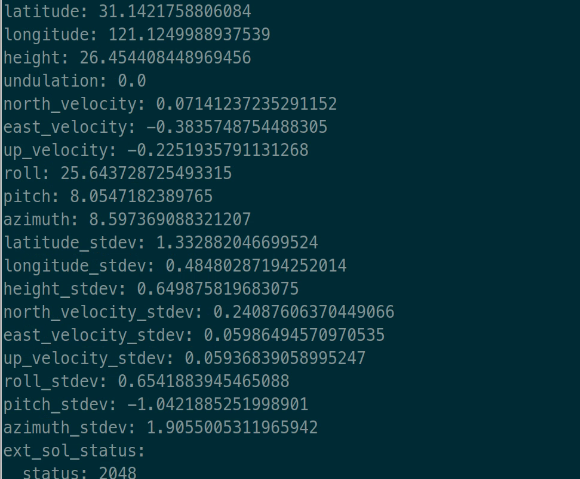
roll, pitch, azimuth
3.1. difference between azimuth and yaw
while the yaw is turn from current orientaion
the azimuth is the absolute heading