1. 流程
1.1. RGB Image
- 获取图像
- 利用传统的方式得到主体脉络
- 提取RGB关键点
- 判断抓取位置
1.2. RGB Image + 3D Model
如果有3D模型,则通过RGB关键点匹配模型,得到关键点的3D坐标
利用多组点,求解6D位姿
1.3. 疑惑
- 什么是主体脉络
- 2d特征点的3d坐标
2. 安排
基于模型的位姿估计
- 提前在3D模型上选好特征点,确定特征点在模型坐标系下的坐标
- 计算RGB图象中的特征点,
3. Survey
位姿估计方法
3.1. 已知三维模型
PNP,based on marker
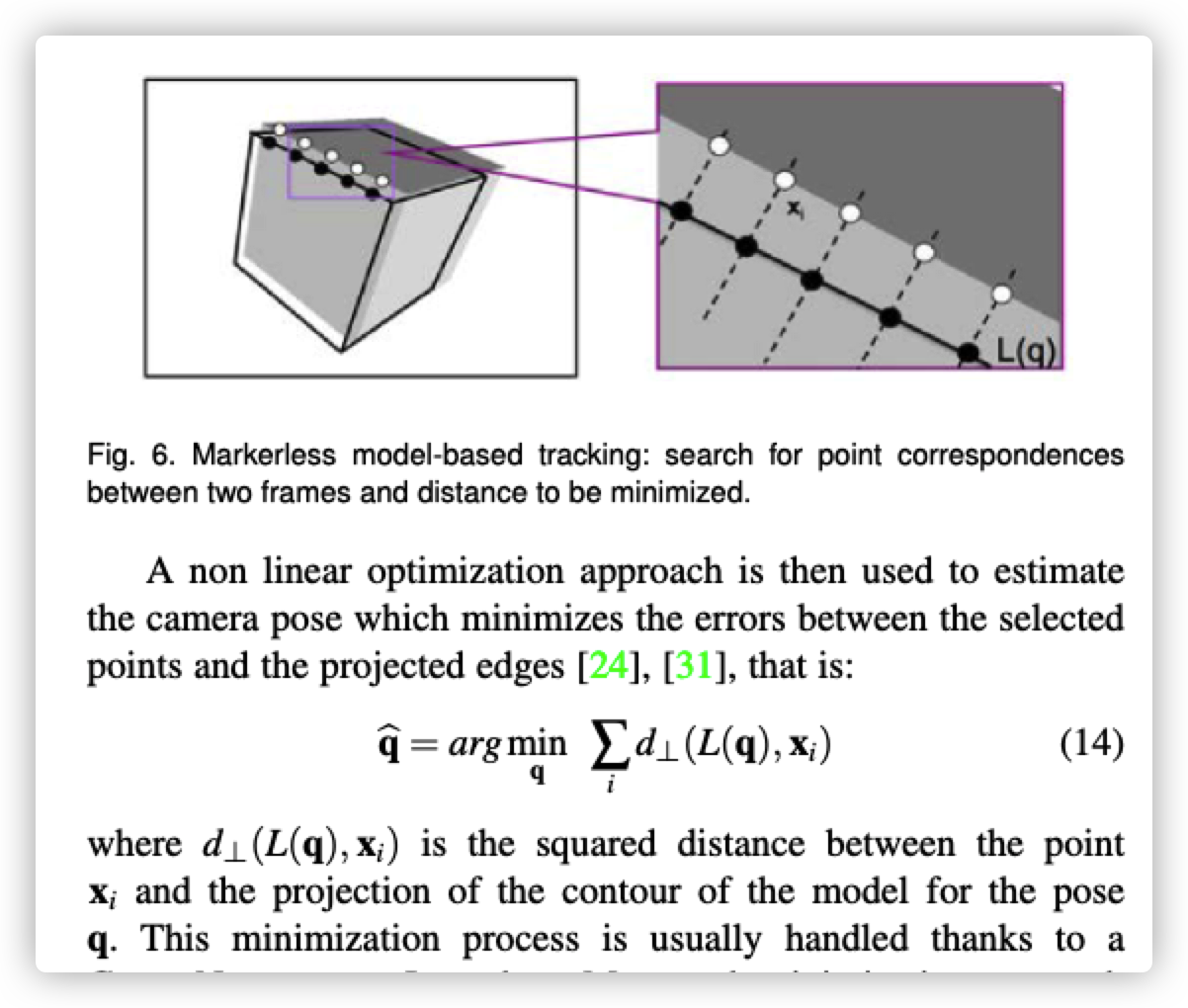
Markerless.
Search for point correspondences between two frames and distances to be minimized