1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
| import cv2
from cv2 import norm
import numpy as np
import matplotlib.pyplot as plt
from sklearn.metrics import balanced_accuracy_score
from numpy import fft
image = cv2.imread('test.jpg')
img_h, img_w = image.shape[:2]
def normal(array):
array = np.where(array < 0, 0, array)
array = np.where(array > 255, 255, array)
array = array.astype(np.int16)
return array
def MotionKernel(img_h, img_w,size):
blur_kernel=np.zeros((img_h, img_w ))
blur_kernel[int((img_h - 1)/2):int((img_h - 1)/2)+size, int((img_w - 1)/2)] = np.ones(size)
return blur_kernel/size
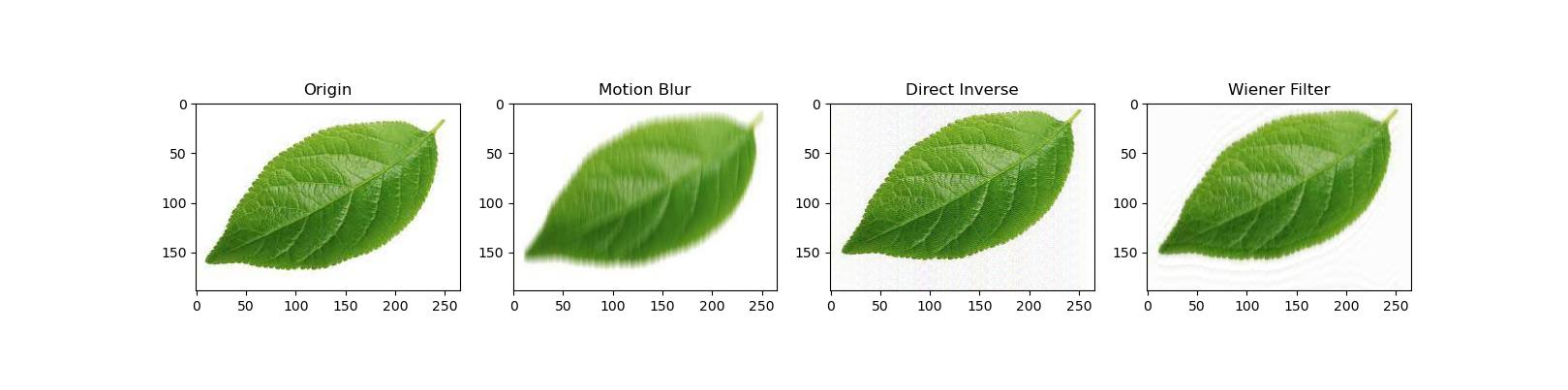
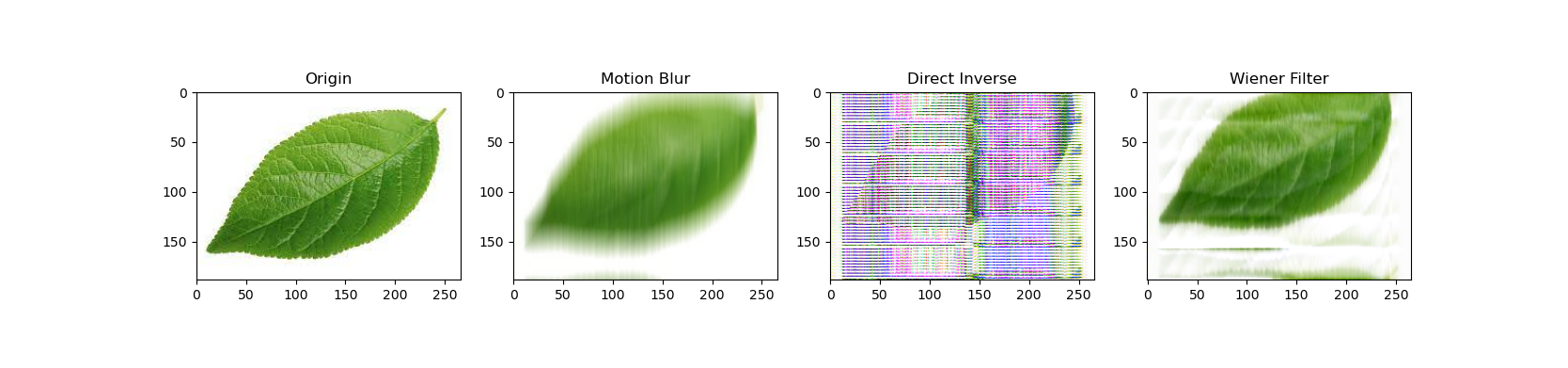
def InvFilter(img,kernel):
input_fft = fft.fft2(img)
PSF_fft = fft.fft2(kernel)
result = fft.ifft2(input_fft / PSF_fft)
result = np.abs(fft.fftshift(result))
return result
def WienerFilter(img,kernel,K=0.01):
input_fft = fft.fft2(img)
PSF_fft = fft.fft2(kernel)
PSF_fft_1 = np.conj(PSF_fft) / (np.abs(PSF_fft) ** 2 + K)
result = fft.ifft2(input_fft * PSF_fft_1)
result = np.abs(fft.fftshift(result))
return result
blur_kernel=MotionKernel(img_h,img_w,11)
blurred = cv2.filter2D(image, -1, blur_kernel)
b_gray, g_gray, r_gray = cv2.split(blurred.copy())
Result=[]
Result2=[]
for gray in [b_gray, g_gray, r_gray]:
channel =InvFilter(gray,blur_kernel)
channel2 =WienerFilter(gray,blur_kernel)
Result.append(normal(channel))
Result2.append(normal(channel2))
deblur_inv=cv2.merge([Result[2],Result[1],Result[0]])
deblur_wie=cv2.merge([Result2[2],Result2[1],Result2[0]])
|