1. Intro
单目相机标定目标:相机的内参(fx,fy,cx,cy)和畸变,建立从世界坐标到像素坐标的映射
How: 张正友标定法
原理:
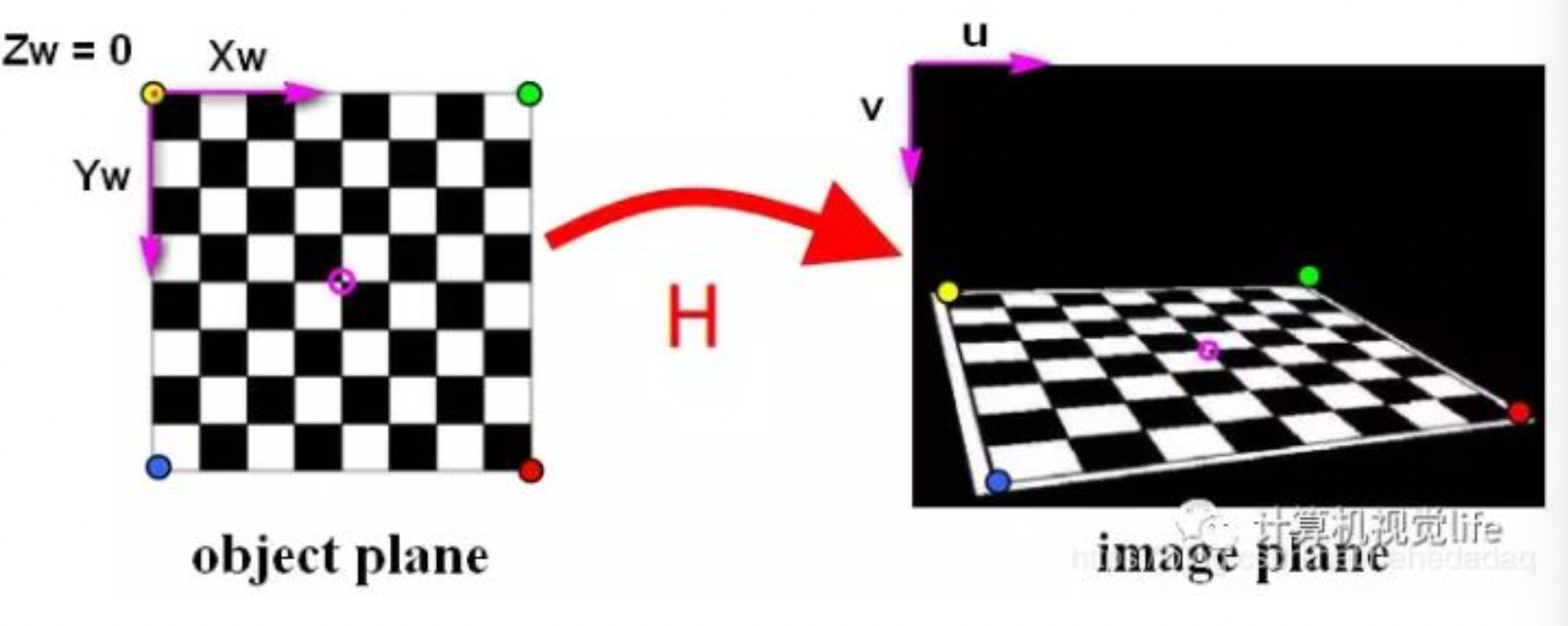
- 从世界坐标到像素坐标的映射包含了内参和外参,是一个$3\times 3$矩阵(单应矩阵$H$),有8个自由度(一个特征点的xy包含了两个方程,所以一共需要4个特征点)
- 求出单应矩阵之后再分别求内参、外参
应用:通过棋盘格,棋盘格设为世界坐标系,并且边长也知道,因此世界坐标系的点坐标知道了,因为特征点多于4个,因此可以做优化
2. 推导

利用单应矩阵的性质
- 旋转向量点积为0
- 旋转向量长度相等
通过两个等式,用内参代掉外参,然后只剩下内参,可以把内参求出来。
- 每张图片有2个方程
内参一共有6个未知数,需要最少3张图片
知道内参以后,外参也可以顺利求得