1. Goal
For the robotics algorithm and development, a simulation platform is needed
In this post, I would review existing robot simulation platform, and decide one for further developmetn
Consideration:
- Open Source
- Speed
- Lightweight
What makes a good simulator from zhihu
- Accurate physics
- Various sensor
- Standard
For my current simulation, I want to try a mobile robot with arm, find a simulation platform that provide the existing robot is a great idea.
Since the purpose is to verify the algorithm, still a huge gap between Sim and Real, so the simulator could focus on the vision and kinematics rather than dynamics.
Kuka YouBot is the kind of robot I would like use,
2. Compare
Webots
Existing model and sensor to use
QT+ODE+OpenGL
Gazebo: too much dependency, huge system, open source
Nvidia: Rely on Nvidia GPU
Currently, I think the Webots would be the choice to go
3. Test
A .wbt file contain all the info
- World info
- viewpoint
- Background and lighting
- Object
To save the world, pause, reset, modify, save
Use different language to write the controller
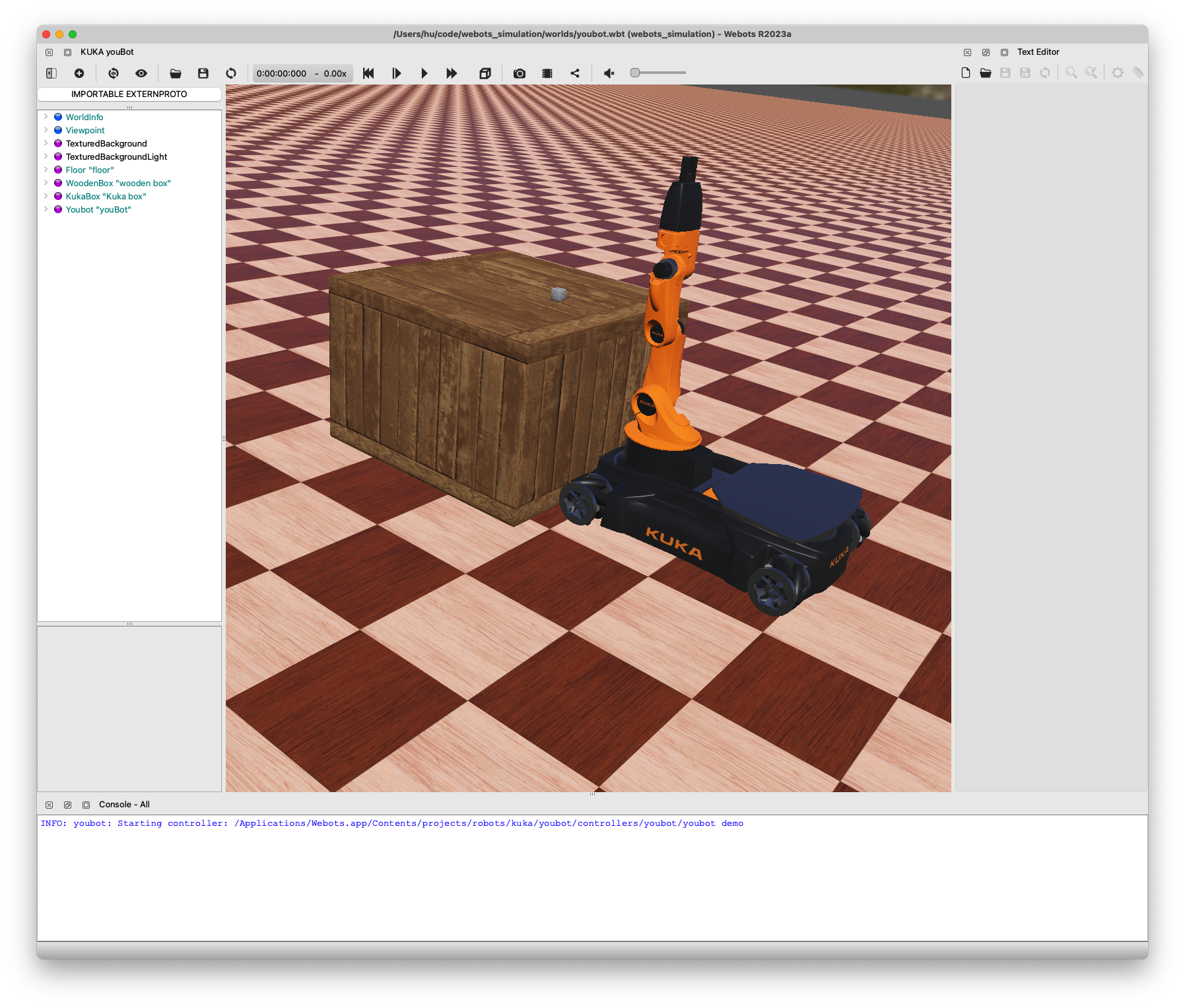
Works great, and not much hassel
4. Conclusion
For current simulation purpose, the Webots is choosed becaused the out-of-box experience
- Pre commercial product, make it a stable simulation
- Offical model like Kuka YouBot make a good out-of-box experience
- Python and multiple language support
- Camera sensor support