1. Compare Obstacle Avoidance Algorithm
1.1. 1 Bug algorithms
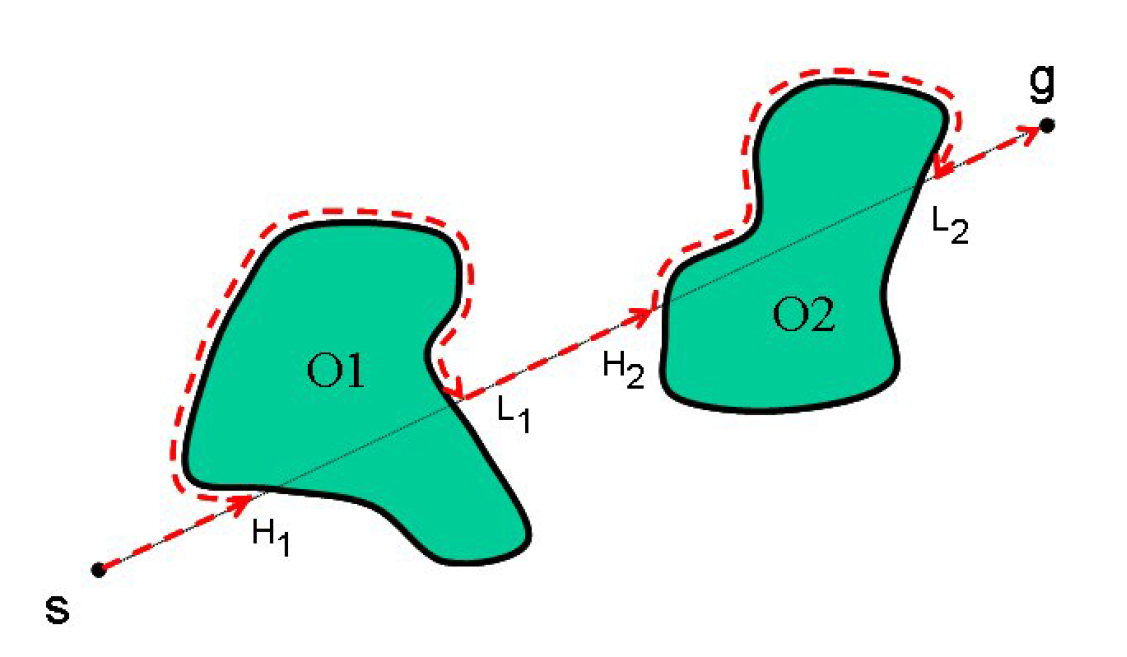
- Simple
- Non optimal
- May be trapped in maze structures
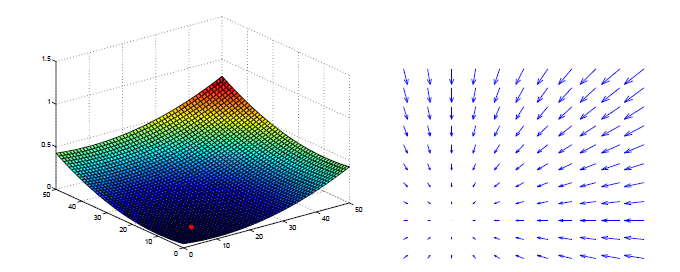
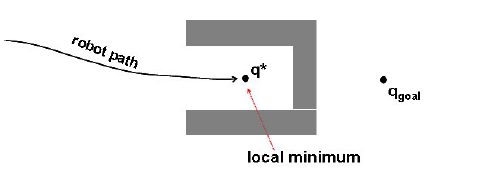
1.2. 2 Potential Field
| Attractive Potential | Repulsive Potential |
|---|---|
 |
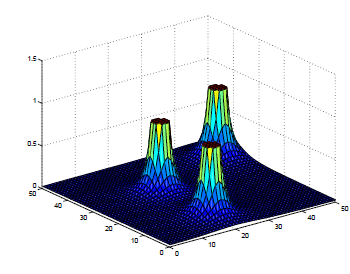 |
Combine Attractive Potential and Repulsive Potential
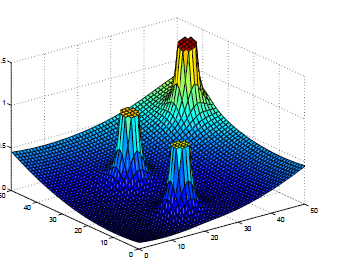
Good for static and completely known environment
Bad: may lead to a local minimum point
1.3. 3 D*
D* is an extension of the A* algorithm for finding minimum cost paths through a graph
- Support incremental replanning