1. Intro
Feedback control
- Use the model of the system to predict its behavior
- Compute an optimal control input that minimize a given cost function
- Subject to constrainsts
Basic Idea:
- formulate a dynamic optimization problem
- tracking trajectory
- regulating process variable
- minimize energy consumption
Advantage:
- Handle system with nonlinear dynamics and constraints
- explicitly use the model of system
- Handle multivariable system
- Handle time-varying parameters
2. For Car-like Control
Trajectory
yaw
init, find the closet point
In each step
get reference point (next few points)
Use the MPC control
predict the motion
formulate the optimization problem
constraints
cost function
solve
Update car state
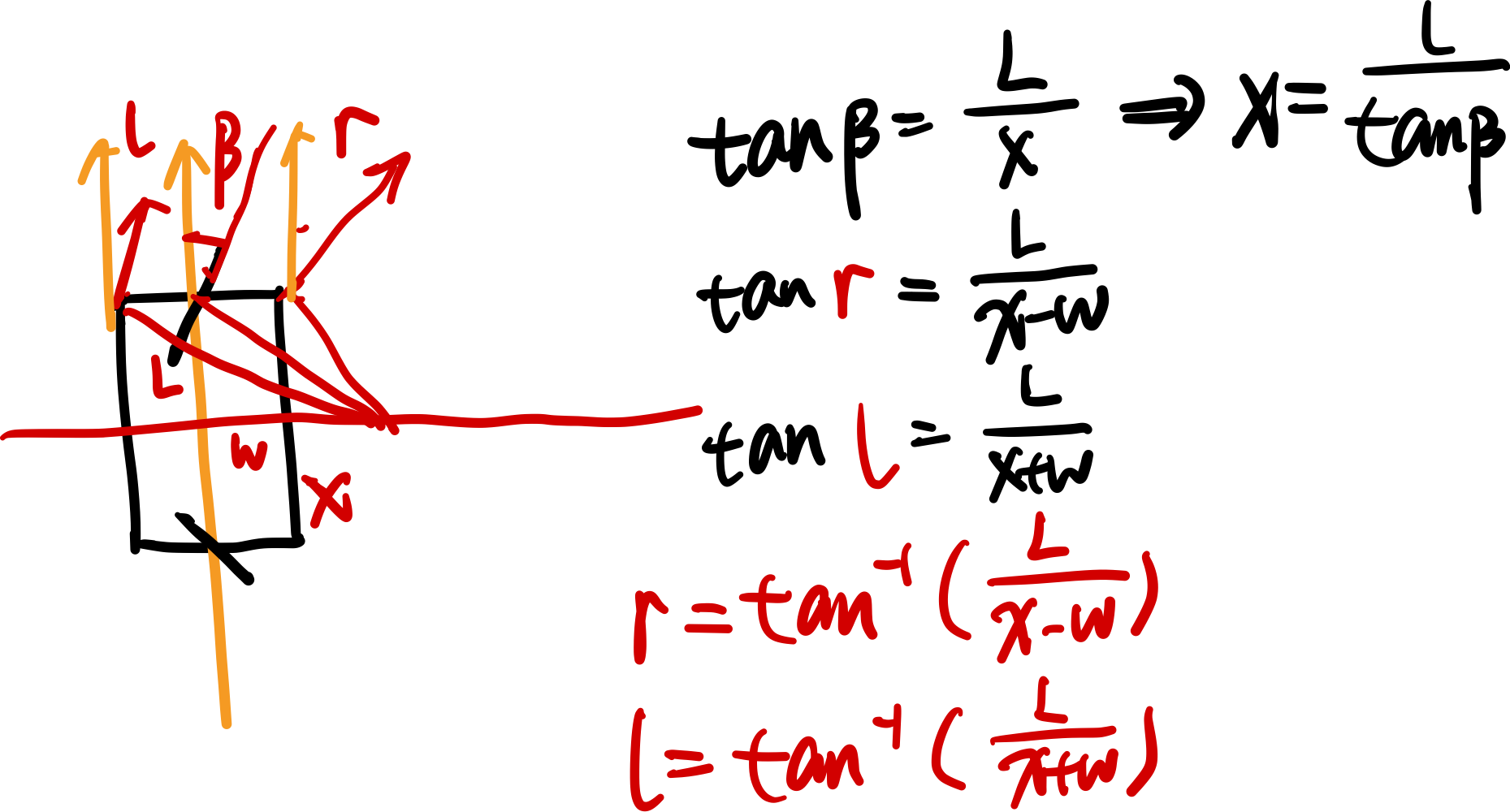
3. Wheel Steer
In the MPC, we used a simplified car model (bicycle model), there are only two wheels (front and back) in the car. Here is the problem
- Given front and back steer, how to calcualte the real steer the car should go?
Almost the same, but in opposite direction