1. Math Formulation
目标:生成一条符合要求的轨迹(点的集合)
- 目标是根据需求来选择的,一般的会有的需求
- 时间
- joint constraints
- 避障
- 点:在三维空间中
2. Library
OMPL (Open Motion Planning Library)
- sampling based and optimization based
- How: PRM (Probabilistic Roadmaps ), RRT, BIT( Batch Informed Trees)
- Input: include the robot’s configuration, the environment
- Output: the motion plan, a sequence of robot configuration or trajectories
PIMPL (Pilz Industrial Motion Planner)
- especially designed for industrial robot
STOMP (Stochastic Trajectory Optimization for Motion Planning)
- optimization based, suited for many degree of freedoms
- How: iteratively optimizing a random trajectories
SBPL (Search-Based Planning Library )
- search based
- How: reprensent the robot and environment as a grid, then use search algorithm like A*, Dijkstra, to explore
CHOMP (Covariant Hamiltonian Optimization for Motion Planning )
- optimization based
- How: based on the Hamiltonian formulation of mechanics and optimizes the Hamiltonian of the system subject to constraints.
3. Math Basis
RPM, RRT, BIT, Search, Optmization
3.1. Cell Decomposition
Sample the space into grid, so the problem degrade to a classic search problem
- Bad for high-dimensional situation
3.2. Control based
- Fast, can be done in online with minimal error
- Difficult to compute with complex dynamics
3.3. Potential Fields
Simple and intuitive
- Real time speed
- Fail in local minima
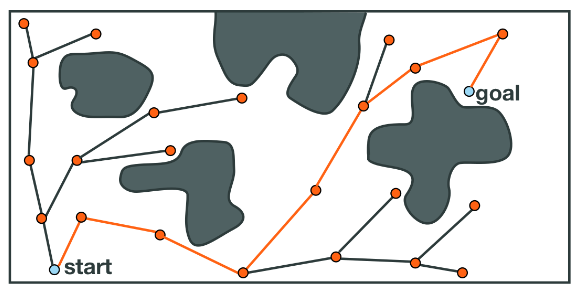
3.4. Sample Based
- If the solution exist, the method would find it
Some idea: workspace, state space, free state space, ppath
Two type
- PRM, Using the knowdege of graph
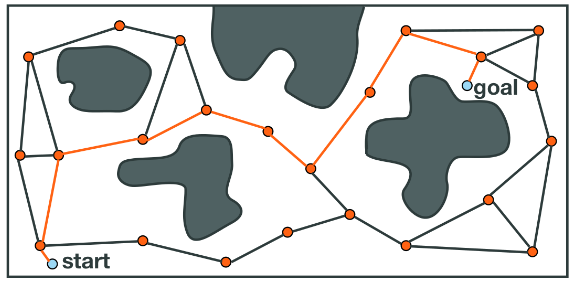
- Tree based
Important tool
- Collision checking
- Nearest neighbor