1. Goal
针对机械领域的复杂工程问题提出解决思路,设计满足特定需求的机械、电子系统或具体解决方法与流程
基础知识:
工程图学:绘制和阅读机械工程草图- 刚体力学:刚体运动的数学建模表达,平动、转动、定轴转动
- 机械制图CAD:CAD软件的基本操作,三维设计SolidWorks
- 设计、材料和制造:不同材料和制造的基础知识
扩展知识
- 电机与拖动:直流电机、伺服电机的结构与工作原理,矩、力的计算
机械的设计思维,
- 功能,设计
- 功能性需求:模仿人工怎么采摘,两个手指头往下一揪
- 实际问题:相机平面误差,冗余性设计,宽度做宽一点
- 改进:做一个机构,根据功能来,
- 从概念到实用
- 供应链
- 知道已经有了哪些东西
- 电机,问答机制
- 电机
设计时候的漏洞
- general的经验,可以避免
- spec的经验,很难避免
2. 机器人
算法需求,机器人要做的事情
- 动力学:动的很快的时候成为一个约束
- 驱动装置,连杆、齿轮
- 最重要:画图,机械夹爪的驱动方式
- 传感器,测距,单点的
- 算法,
- 各种层面的需求
3. Crash Course
https://www.youtube.com/watch?v=A1V-QQ5wFU4
Invention of wheels
Need a engine: steam engine
Air, space, robotics, automation, biomechanics
4. 机械原理
机构:传递与变换 运动和力 的 可动装置
4.1. 机构结构分析
基本概念
- 构件,lnik,独立的运动单元
- 运动副,kinematic pair,两个机构接触而成的可动连接
- 运动链,kinematic chain,通过运动副连接而构成的可相对运动系统
- 原动件(主动件):按给定的已知运动规律独立运动的构件
- 欠驱、冗驱:原动件数多余机构自由度
自由度=3 * 活动构件数 - (2 * 低副数 + 高副数 - 虚约束数) - 局部自由度
4.2. 运动分析
速度瞬心(速度为0的点),刚体的瞬时运动可以理解为绕瞬心旋转,简化计算
速度、角速度、角加速度
4.3. 力学分析
两种力
- 驱动力 driving force
- 阻抗力 resistance
摩擦力的确定,当量摩擦系数$f_v$
- 移动副
- 旋转副
4.4. 机械效率、机械平衡、速度波动调节
$$
\eta=\frac{P_r}{P_d}=\frac{输出功率}{输入功率}
$$
串联效率:$\eta=\eta_1\eta_2…\eta_k$
并联效率: $\eta=\frac{\sum P_{ri}}{\sum P_{di}}$,总效率取决于传递功率最大的机器的效率
机械平衡目的:将构件的不平衡惯性力加以平衡消除不良影响
转子平衡、机构平衡;静平衡、动平衡
应设法将速度限制在许可范围内
- 启动阶段
- 稳定运转阶段,平均角速度保持常数、角速度周期性波动
- 停车阶段
4.5. 常见机构
4.5.1. 连杆机构
特点;原动件经过一个中间构件(coupler)才能传动从动件
优点:
- 运动副一般为低副,面接触,压强小,磨损小,加工制造容易
- 容易改变运动传递方向,扩大行程,远距离传动
缺点:
- 传动路线长,容易产生累计误差
- 惯性力很难消除,不适用于高速运动
平面四连杆
4.5.2. 凸轮机构
凸轮:cam,作为主动件做等速转动
推杆:作为从动件,被凸轮直接推动的构件
运动规律:推杆的位移、速度和加速度随着凸轮转角的变化而变换
- 多项式
- 三角函数
设计方法:反转法,根据需要的运动曲线设计轮廓
4.5.3. 齿轮机构
优点:传递功率范围大,效率高,精度高,寿命长,可靠
缺点:成本较高,制造和安装精度要求较高
平行轴间传动
- 外啮:相反转动
- 内啮:相同方向
- 直齿轮、斜齿轮、人资齿轮
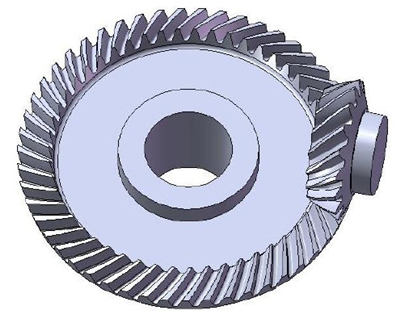
相交轴间传动:
- 锥齿轮
- 直齿:应用最广
- 曲线齿:承载能力高,用于告诉承载
5. 机械设计
5.1. 总论
机器的基本组成要素是零件,学习一般尺寸常用工作参数下的通用零件设计。
机器的组成:动力源、传动、执行、测控、辅助
设计程序:动力学设计,动力学计算,零件工作能力,装配草图设计,零件核验
零件的失效形式:断裂、形变、磨损
零件的设计准则:强度、刚度,可靠性,MTTF,MTBF
5.1.1. 零件的工作能力
载荷:应力
体积强度:静应力强度失效会断裂或变形,变应力强度失效导致疲劳断裂
表面强度:表面挤压强度、表面磨损强度
刚度:零件抵抗弹性形变的能力
冲击强度:采用能增大零件弹性形变的结构
5.1.2. 疲劳强度
疲劳极限应力图,近似为抛物线分析,简化为几条折线段
5.1.3. 磨损
金属表面的滑动摩擦
膜厚比,用于大致估计两滑动表面所处的摩擦状态
磨损:三个阶段
- 磨合阶段,表面轮廓形状变化
- 稳定磨损,磨损平稳而缓,长短代表了零件使用寿命的长短
- 剧烈磨损阶段,出现噪声和振动
润滑油:最重要的性能之一:黏度,流动阻力
5.2. 连接
5.2.1. 螺纹连接
参数:大径、小径、中径,线数(2,3)
螺栓连接:加工精度低,结构简单
铰制孔螺栓:精确固定相对位置,承受较大横向载荷
双头螺柱:不能采用螺栓的场合,材料较软,需要经常拆装
防松手段:
- 摩擦防松:对顶螺母,弹簧垫圈,自锁螺母
- 机械防松:开口销,止动垫圈
设计螺栓组:确定数目、布置方式、结构尺寸
- 轴对称的简单几何形状
- 数目4、6、8等偶数
5.2.2. 键连接
平键、滑键、半圆键
花键
无键
5.2.3. 铆接、焊接、胶接
铆接:用铆钉将多个元件连在一起
- 优点:简单、抗振、耐冲击
- 缺点:较为笨重,被连接件强度受到削弱
焊接:通过加热或者加压或者两者并用的方式,使工件达到结合
胶接:利用胶黏剂在一定条件下把预制的元件链接在一起
- 优点:可以胶接不同性质的材料;面连接,耐疲劳性好;工艺简单
- 缺点:抗剥离、抗弯曲性能较差;耐老化性能较差;检测手段不完善
过盈连接:利用零件间的配合过盈来达到连接目的
5.3. 传动
意义:运动形式、 参数的改变,调速
分类
- 摩擦传动:带传动、摩擦轮传动
- 啮合传动:共轭啮合、非共轭啮合
- 液压与气动
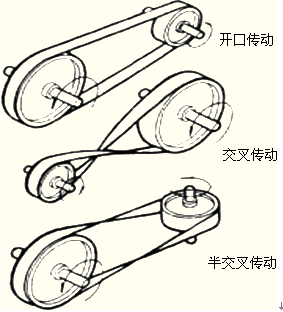
5.3.1. 带传动
挠性运动,基本组成:主动带轮、从动带轮、传动带
- 优点:结构简单,传动平稳,噪声小
- 缺点:有弹性滑动,打滑等现象,带的寿命短,压轴力大
5.3.2. 链传动
挠性运动,基本组成:链条、小链轮、大链轮
- 优点:传动效率高,更准确的平均传动比,成本较低,制造安装精度要求较低
- 缺点:不能保持恒定的传动比,有噪声
5.3.3. 齿轮传动
齿轮
- 优点:效率高,工作可靠
- 缺点:精度要求高,价格高
5.3.4. 蜗杆传动

- 优点:效率高,承载能力高,体积小,质量小
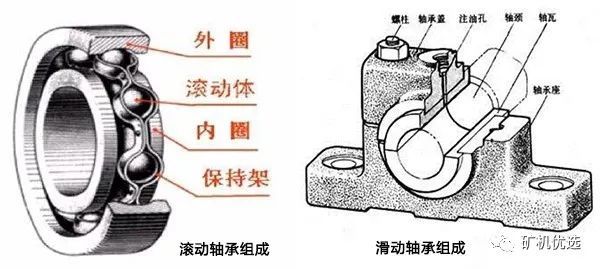
5.4. 轴系零部件
意义:轴、滑动轴承、滚动轴承、联轴器、离合器等内容,支持并保证传动零件持续保持正确位置
滑动轴承:用途:转速高,冲击大,在水或腐蚀性介质中工作
滚动轴承: