1. Why
Method: test the single motor first and then deploy it to real robot
Any problem can be solved using a layered abstraction
2. Motor Types
AC Motor, taken from AC, application in industrial
- Higher power, higher torque
Brushed and Brushless DC
- Brushed
- Brushless: smooth, no noise, efficient, high speed
Geared-: Speed reduction
Stepper/Servo: highest precision
3. Control the Motor
- Motor, can’t de anything
- Supply Voltage, the motor can move
- Motor Driver, take low voltage and output high voltage
- Motor Controller, take practical input and output real signal
- Open-loop control, feedback control, encoder, at a precise speed
- Communication layer, serial
- Robot controller
- Driver software,
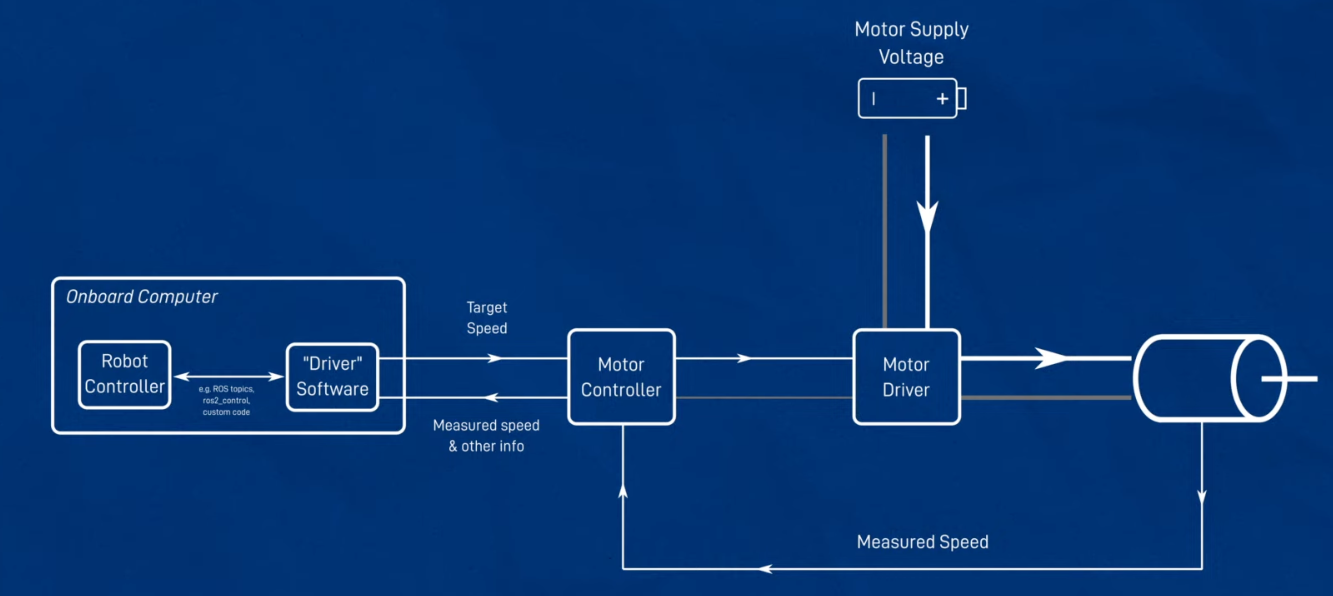
Keep the system more modularity, easier to swap the components
4. For Robot
How to choose?
- Torque, know the load of your robot
- Speed, on mobile robot, trade off between torque and speed
- Accuracy,
- Voltage, check the nominal volt, the mainstream
5. How to Master Robotics
Stage 1
- Programming
- Assembly
- Electronics
Stage 2
- OO-programming
- Math and Physics
- Linux
- Embedded System
Stage 3
- Algorithm
- Library
- ROS
- Design:need a mechanical expert
Stage 4
- Technology that fascinating
- Work on various tool
- Work with as many single board as possible
- Maintain the project gut hub
6. Speed, Torque, Current
First, there is current, the current in the magefield would generate force
If there is movement, it would generate a oppose voltage (current)
- Faster, the current would be less
- Stall, the largest current
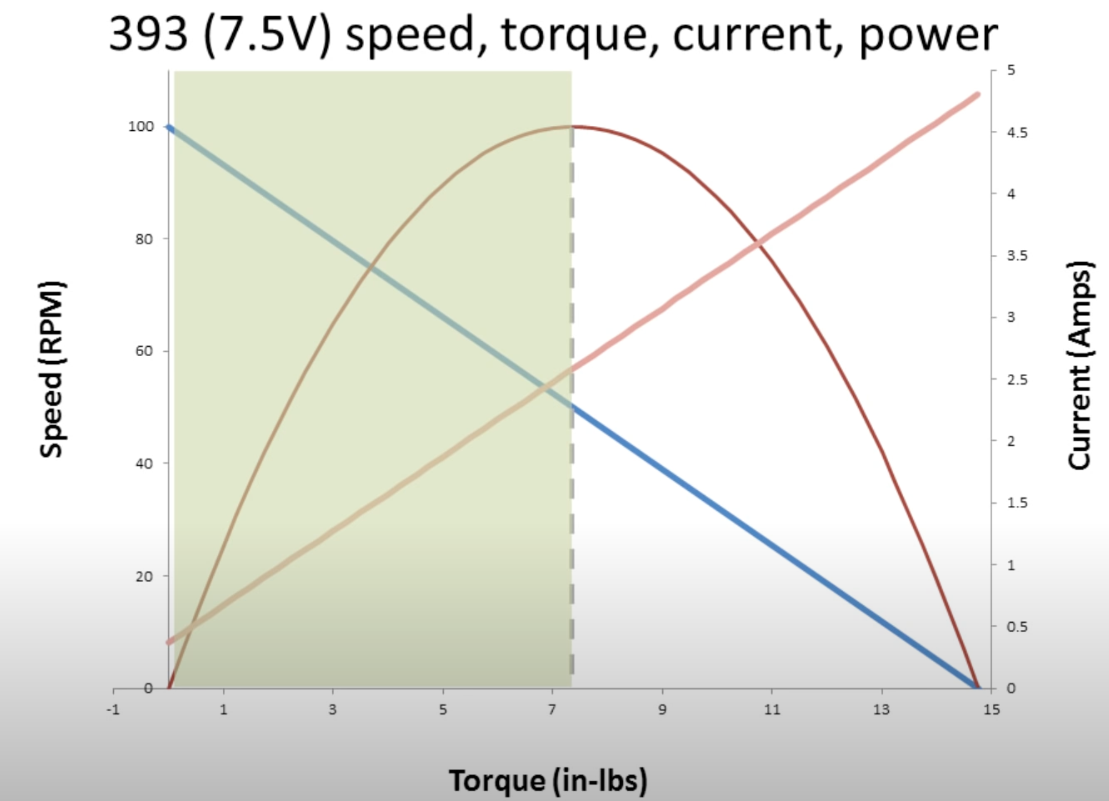
Try to keep in the left half